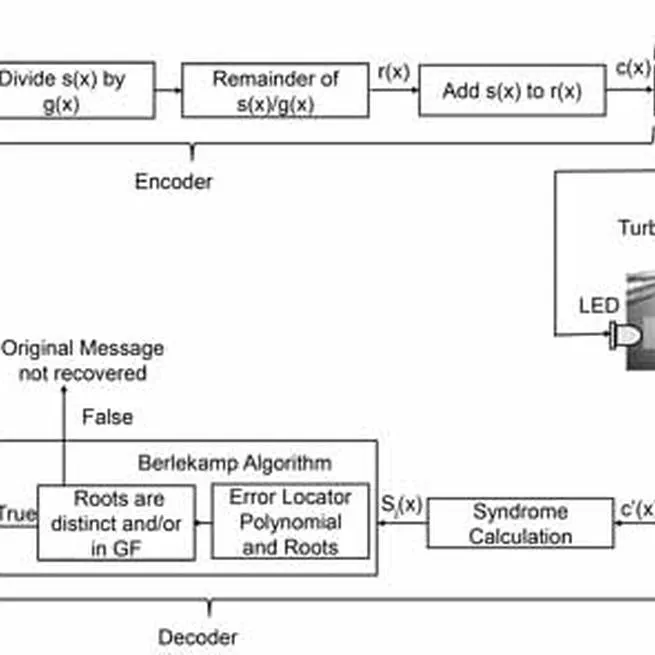
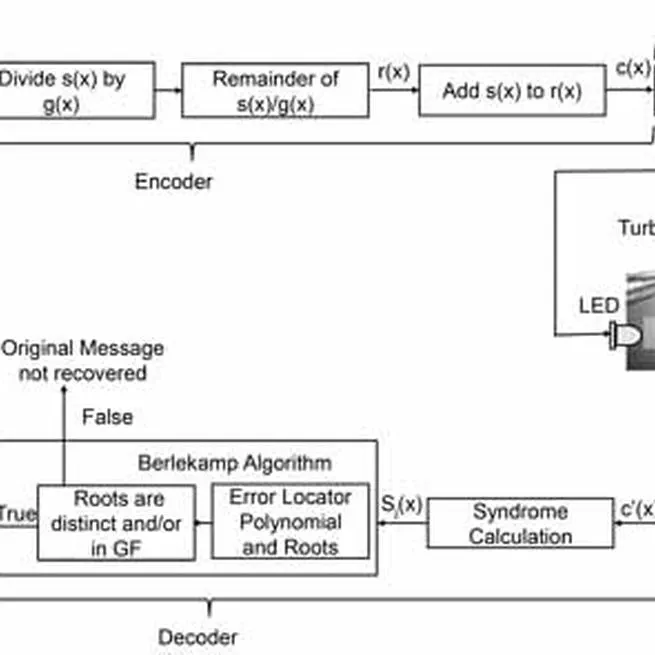
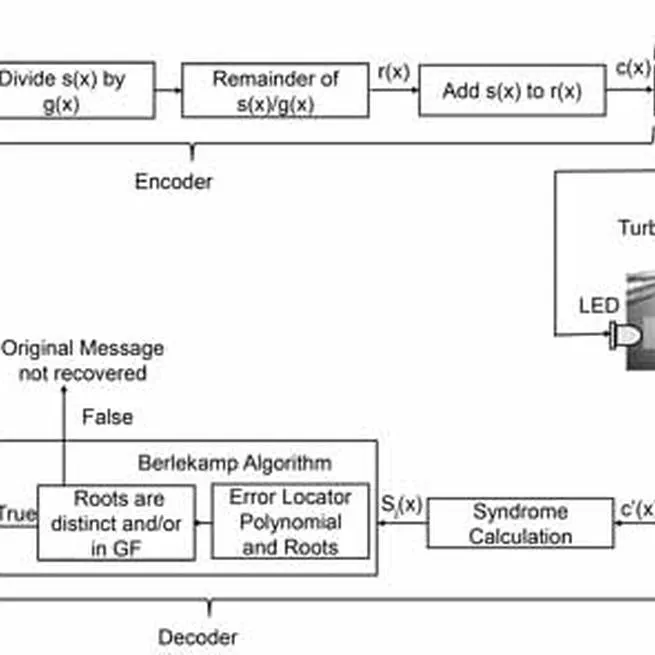
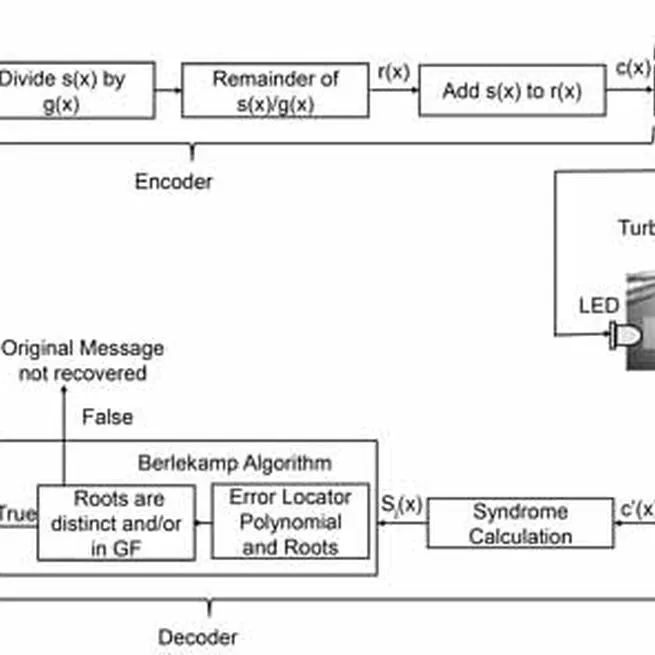
Experimental Demonstration and Evaluation of BCH-Coded UWOC Link for Power-Efficient Underwater Sensor Nodes
The proposed BCH-coded system needs a reasonable amount of computing capability and is powered by a battery, enabling the node to have an on-site data processing unit and untethered communication. The encoder and decoder algorithms of the BCH code are implemented on the Embedded C software and coded to run on an Atmel ATmega128A micro-controller. The system’s performance is evaluated by emulating the effects of scattering and absorption, noise due to surrounding and ambient light, turbidity, air bubbles, and turbulence in a natural underwater environment.
Jul 4, 2022
Experimental demonstration and evaluation of BCH-coded UWOC link for power-efficient underwater sensor nodes
Jan 1, 2022
Aqua-Aware: Underwater Optical Wirelesss Communication enabled Compact Sensor Node, Temperature and Pressure Monitoring for Small Moblie Platforms
Jan 1, 2022
Aqua-Aware: Underwater Optical Wireless Communication enabled Compact Sensor Node, Temperature and Pressure Monitoring for Small Mobile Platforms
Jan 1, 2022
Novel Wilkinson power divider with an isolation resistor on a defected ground structure with improved isolation
Jan 1, 2021
Tooth aging monitoring using ultrasound and CNN
Jan 1, 0001
ML augmented Analysis of Biomaterial Concentration in Bioprinting via Ultrasound Signal
Jan 1, 0001
DUI Detection via ML and Ultrasound
Jan 1, 0001